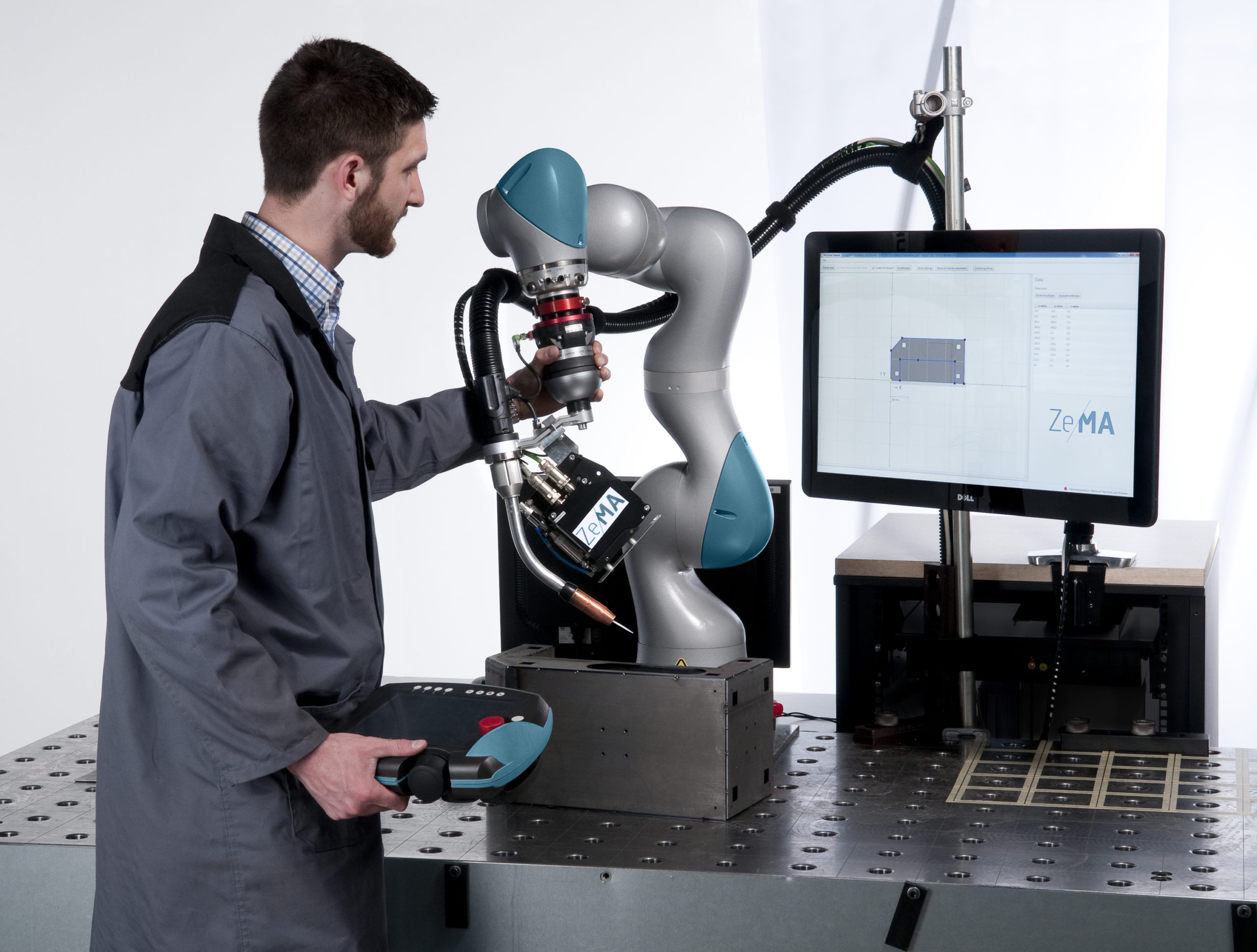
Im aktuellen EU-Forschungsprojekt 4by3 werden derzeit verschiedene Szenarien für die Mensch-Roboter-Kooperation umgesetzt. Arbeitspakete vom ZeMA sind einerseits die Entwicklung eines Mensch-Roboter-fähigen Systems und anderseits die Umsetzung von zwei Anwendungsszenarien.
Problemstellung
Zielsetzung
• Modularität
• Sicherheit
• Benutzerfreundlichkeit
• Effizienz
Vorgehen
Die konstruktionssystematische Entwicklung des modularen, flexiblen und kollaborativen 4by3 Roboters besteht aus mehreren Arbeitspaketen. Neben Aktoren-, Steuerungs- und Sicherheitsentwicklung beschäftigt sich das ZeMA mit der Entwicklung der Armmodule und deren Verbindungselementen. Über eine kinematische Strukturanalyse werden die erforderlichen Arbeitsräume des Roboters untersucht und in einen kinematischen Roboterbaukasten überführt. Als Grundlage der Optimierung des Baukastensystems dient die Validierung und Realisierung des 4by3 Roboters im Produktionsumfeld.
Ergebnisse / Projektstand
Durch die Modularität der neuen Robotergeneration können Hard- und Software der Systeme vom Anwender beliebig kombiniert werden. So können die Roboter optimal an die jeweilige Aufgabenstellung angepasst werden. Neue Mechanismen und Strategien können während des Betriebs am gemeinsamen Arbeitsplatz die größtmögliche Sicherheit für den Arbeiter gewährleisten. Durch multimodale Interaktionsmechanismen kann eine besonders einfache Programmierung ermöglicht werden. Hierdurch wird die Benutzerfreundlichkeit vor allem für Arbeiter:innen ohne Vorkenntnisse im Programmieren deutlich erhöht.
Durch diese Maßnahmen werden effiziente Roboter entwickelt, die schnell in Betrieb genommen werden können und zuverlässig und sicher arbeiten.
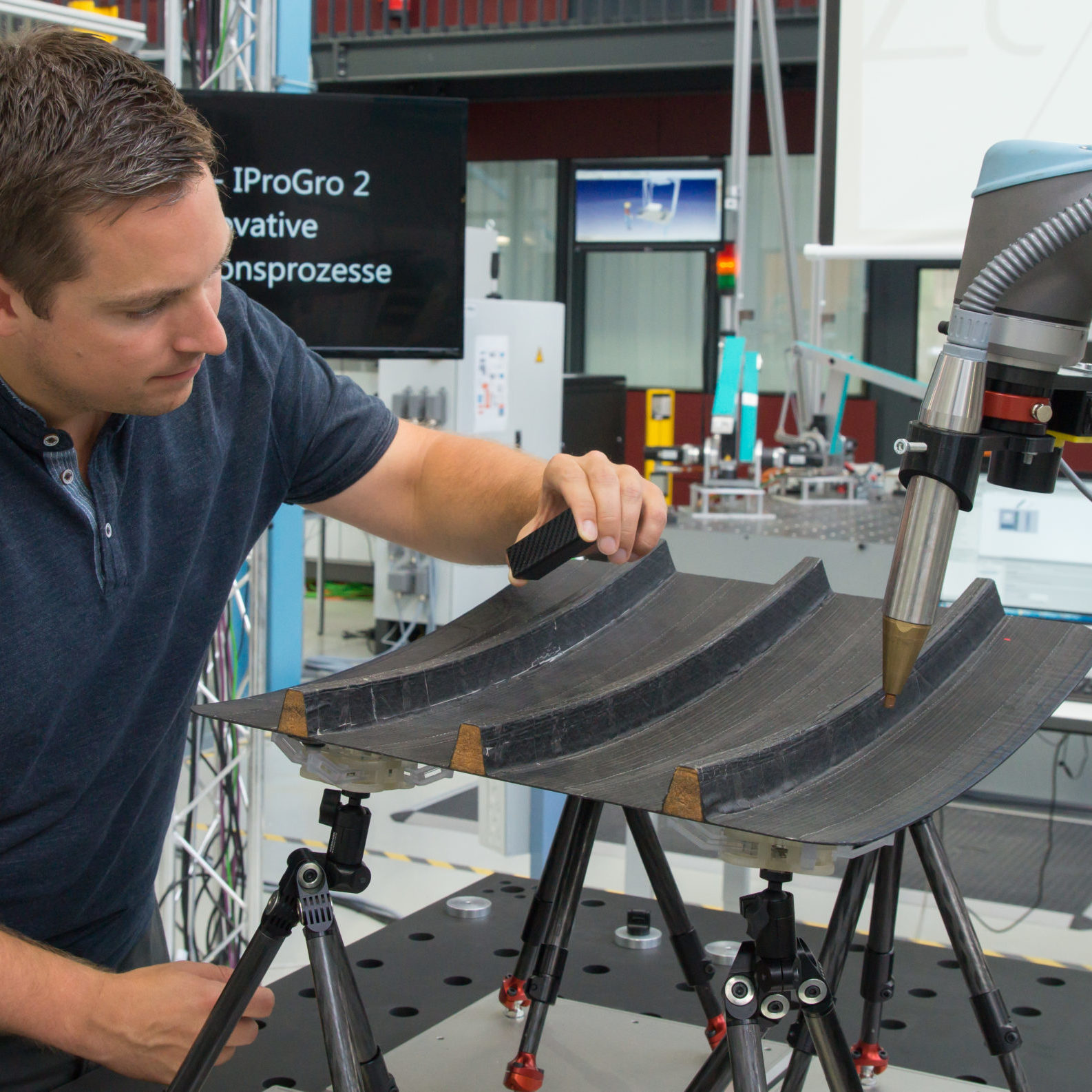
Vier Pilotanwendungen werden genutzt, um die Roboter gemäß den Bedürfnissen in der Produktion zu entwickeln und anzupassen.
Verwertungskonzept:
Laufzeit:
01.12.2014 - 31.12.2017

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}